

Навантажувальні клітини S-типує найбільш часто використовуваними датчиками для вимірювання напруги та тиску між твердими речовинами. Також відомі як датчики тиску на розрив, вони названі своєю S-подібною конструкцією. Цей тип навантажувальної комірки використовується в широкому діапазоні застосувань, таких як масштаби крана, шкала для партії, масштаби механічного перетворення та інші системи вимірювання та зважування електронної сили.
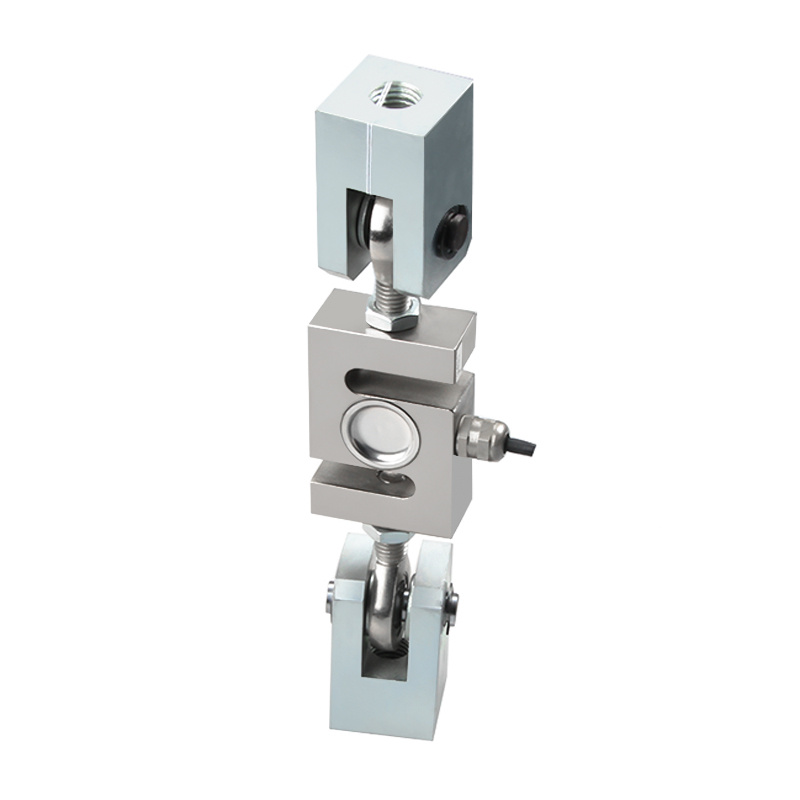
Принцип робочого навантажувального клітини S-типу полягає в тому, що пружне тіло зазнає еластичної деформації під дією зовнішньої сили, викликаючи деформацію деформації, прикріпленого до її поверхні. Ця деформація призводить до зміни значення опору штаму, який потім перетворюється в електричний сигнал (напруга або струм) через відповідну схему вимірювання. Цей процес ефективно перетворює зовнішню силу в електричний сигнал для вимірювання та аналізу.

Під час встановлення комірки навантаження S-типу слід враховувати кілька ключових факторів. По -перше, необхідно вибрати відповідний діапазон датчиків, а номінальне навантаження датчика повинно визначатися на основі необхідного робочого середовища. Крім того, навантажувальну комірку необхідно обережно обробляти, щоб уникнути надмірних помилок виходу. Перед встановленням слід проводити проводку відповідно до наданих інструкцій.

Слід також зазначити, що корпус датчика, захисне покриття та свинцевий роз'єм є запечатаними і не можуть бути відкриті за бажанням. Також не рекомендується самостійно розширити кабель. Для забезпечення точності кабель датчиків слід утримувати від сильних ліній струму або місць з імпульсними хвилями для зменшення впливу джерел перешкод на місці на вихідний сигнал датчика та підвищення точності.

У високоточних програмах рекомендується попередньо розігріти датчик та інструмент протягом 30 хвилин до використання. Це допомагає забезпечити точні та надійні вимірювання. Дотримуючись цих рекомендацій щодо встановлення, датчики зважування S-типу можуть бути ефективно інтегровані в різні системи зважування, включаючи зважування хоппера та застосування силосу, щоб забезпечити точні та послідовні вимірювання.
Час посади: 16-2024 рр.




