


901 Sensor de torque de torque dinâmico e estático de torque estático





Características
1. Capacidades (nm): ± 5 …… ± 500000
2. Usando um método de transmissão não-contato exclusivo para sinais de entrada e saída
3. Pode medir o torque dinâmico e o torque estático
4. Princípio de trabalho: Fonte de alimentação sem fio e saída sem fio
5. Não há necessidade de ajustar o ponto zero ao medir torques para frente e reverso
6. O sinal adota tecnologia digital, forte anti-interferência
7. Polaridade de energia de entrada, torque de saída, proteção do sinal de velocidade
8. Não há peças de desgaste, como anéis de colecionador, e pode funcionar em alta velocidade por um longo tempo
9. A precisão da medição de torque não tem nada a ver com velocidade e direção de rotação
10. Alta precisão e boa estabilidade
11. Pode medir o torque, velocidade e energia para frente e reversa
12. tamanho pequeno, peso leve, instalação fácil
13. Alta confiabilidade e vida longa
14. Pode ser instalado em qualquer posição e direção

Descrição do produto
901 Sensor de torque de torque Sensor de torque e sensor de torque estático. 5n · m a 500000n · m Múltiplas especificações dinâmicas e do sensor de torque estático Medidor de torque.
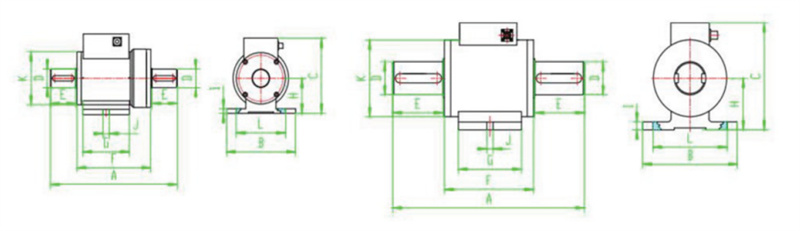
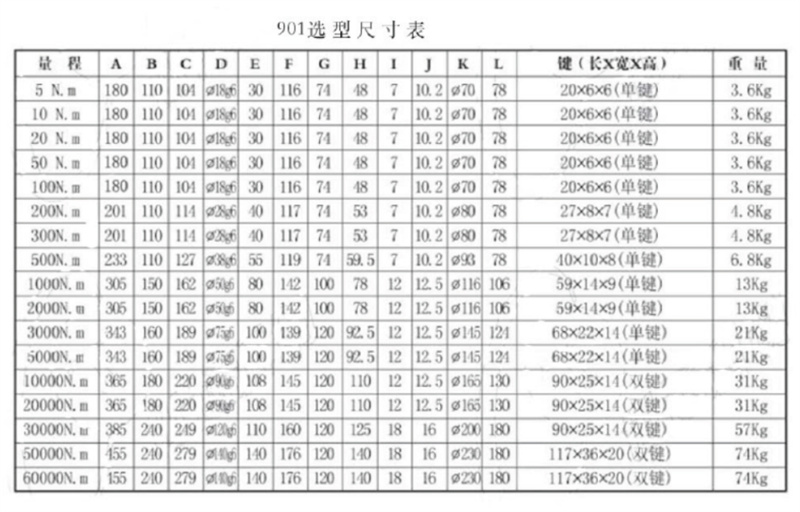
Dimensões
Parâmetros
| Faixa de medição | 0- ± 5. ± 10. ± 20. ± 50. ± 100. ± 200. ± 500. ± 1000 ± 2000. ± 5000. ± 10000. ± 20000. ± 30000. ± 50000. ± 60000. ± 80000. ± 100000. ± 150000. ± 200000 ± 300000. ± 500000 |
| sinal de saída | 5-15kHz, 1-5V, 0-10V, O- ± 5V, 4-20mA |
| amplitude | 10V |
| poder | 4w |
| Velocidade de trabalho | 0-30000R/min (qualquer velocidade de rotação opcional) |
| tensão de fornecimento | 24VDC ± 15VDC Opcional |
| frequência de resposta | 100μs |
| temperatura ambiente | -60-70 ℃ |
| carga máxima | 150%fs |
| resistência ao isolamento | > 200 MΩ |
| zero desvio | <0,5% |
| precisão | 0,1% 0,25% 0,5% opcional |
| repetibilidade | <0,1 |
| Linearidade | <0,1% |
| Histerese | <0,1% |
| Umidade relativa | <90%RH |
| Tempo de resposta dinâmico de ondas de deformação | 32x10-6s |
Precauções
1. A fiação desta série de sensores de torque deve ser conectada de acordo com o diagrama de fiação, e a energia só pode ser ativada após a confirmação.
2. Verifique se a fonte de alimentação selecionada deve ser consistente com a fonte de alimentação de entrada do sensor.
3. A saída da linha de sinal não pode ser conectada ao solo, o que causará um curto -circuito.
4. A camada de blindagem do cabo blindada deve ser conectada à fonte de alimentação do terminal comum da fonte de alimentação de +1 5V.
5. Quando o sensor é fixo, ele deve ser firmemente fixado com a base do equipamento. A altura central deve ser adequadamente ajustada para evitar momentos de flexão. O erro de altura central deve ser menor que 0,05 mm.
6. Se você tiver alguma dúvida durante o uso, entre em contato com nossa empresa a tempo e não poderá desmontá -lo sozinho durante o período de garantia.
7. Nunca insira ou remova o plugue quando a energia estiver ligada.
8. Sinal de saída: Frequência de onda quadrada ± 15kHz ponto zero: 10 kHz, escala completa para a frente: 15kHz, saída de 5kHz em escala completa reversa 4-20mA: Torque zero: 12.000 mA; Escala completa para a frente: 20.000mA; Escala completa reversa: 4.000 mA
9. Esta série de sensores de torque pode funcionar por um longo tempo devido à fonte de alimentação de indução e é amplamente utilizada no monitoramento de torque de motores, centrífugas, geradores, redutores e motores a diesel.
10. Se você precisar medir a velocidade, basta instalar um dispositivo de medição de velocidade especial no shell desta série de sensores de torque. O sensor e sua roda do tacômetro podem medir o sinal de velocidade de 6-60 ondas quadradas por revolução.
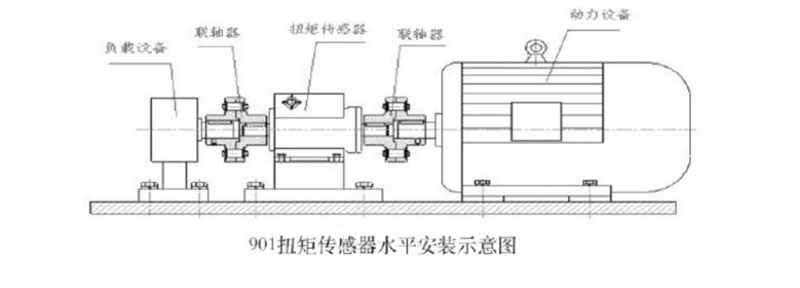
11. Usando dois conjuntos de acoplamentos, instale o sensor de torque da correia entre a fonte de energia e a carga.
12. O equipamento de energia e carga deve ser fixo e confiável para evitar vibrações.
13. Fixar a base do sensor de torque e a base do equipamento da maneira mais flexível possível (pode balançar) para evitar o momento de flexão.
Fiação
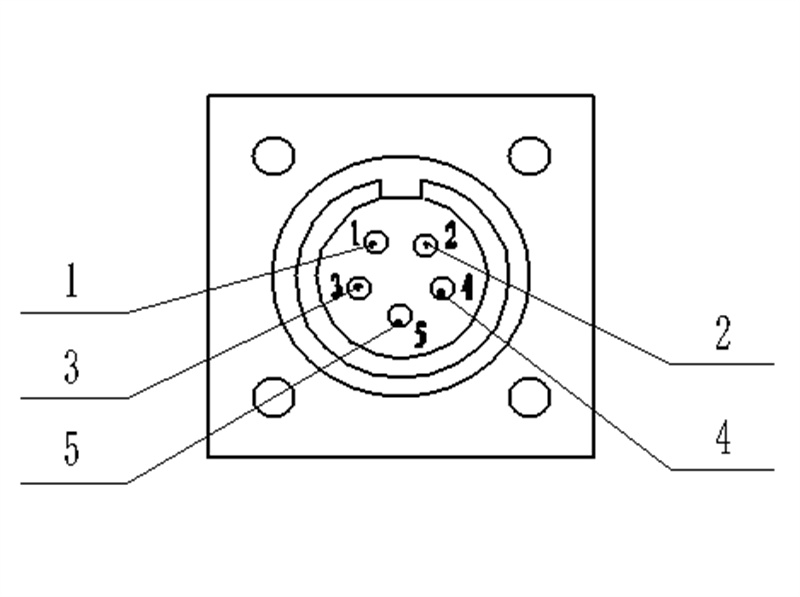
1. Aterramento
2. +15V
3. -15V
4. Saída do sinal de velocidade
5. Saída do sinal de torque
RelacionadoPRODUTOS
-

LKS Intelligent Twist Lock Container sobrecarga d ...
-

WB Tipo de tração Mixer de forragem TMR Processi ...
-

SSB Tipo estacionário Mixer de forragem TMR Proce ...
-

SLB Tank Pesação do Módulo SLB Sensor de deformação SLB
-

705b Micro Dinamômetro personalizado Cerca ...
-

706 Sensor de micro dinamômetro personalizado




