


901 sensore di coppia di coppia dinamica e statica multi-specificazione





Caratteristiche
1. Capacità (nm): ± 5 …… ± 500000
2. Utilizzo di un metodo di trasmissione non contatto unico per i segnali di input e output
3. Can misurare la coppia dinamica e la coppia statica
4. Principio di lavoro: alimentazione wireless e produzione wireless
5. Non è necessario regolare il punto zero quando si misurano le coppie in avanti e inversa
6. Il segnale adotta la tecnologia digitale, forte anti-interferenza
7. Polerità della potenza di ingresso, coppia di uscita, protezione del segnale di velocità
8. Non ci sono parti di usura come anelli da collezione e può funzionare ad alta velocità per molto tempo
9. La precisione di misurazione della coppia non ha nulla a che fare con la velocità di rotazione e la direzione
10. alta precisione e buona stabilità
11. può misurare la coppia in avanti e inversa, velocità e potenza
12. dimensioni ridotte, peso leggero, facile installazione
13. alta affidabilità e lunga vita
14. Può essere installato in qualsiasi posizione e direzione

Descrizione del prodotto
Sensore di coppia dinamico del sensore di coppia 901 e sensore di coppia statica. Da 5n · m a 500000N · m Multi-Spec Dynamic e Static Topor Torque Torque Meas.
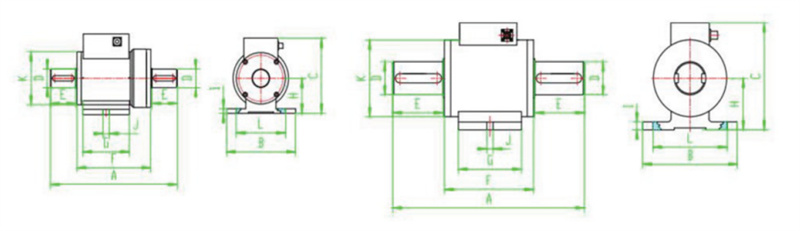
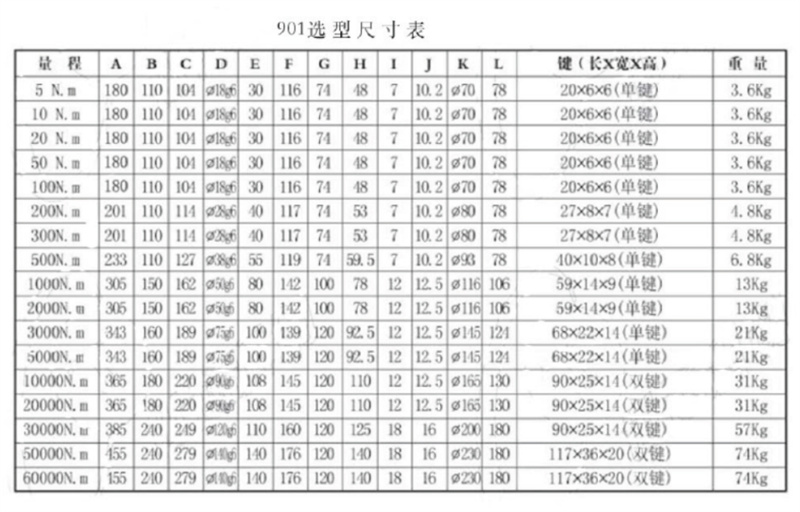
Dimensioni
Parametri
| Intervallo di misurazione | 0- ± 5. ± 10. ± 20. ± 50. ± 100. ± 200. ± 500. ± 1000 ± 2000. ± 5000. ± 10000. ± 20000. ± 30000. ± 50000. ± 60000. ± 80000. ± 100000. ± 150000. ± 200000 ± 300000. ± 500000 |
| segnale di uscita | 5-15kHz, 1-5V, 0-10 V, O- ± 5V, 4-20 mA |
| ampiezza | 10v |
| energia | 4w |
| Velocità di lavoro | 0-30000R/min (qualsiasi velocità di rotazione opzionale) |
| Tensione di alimentazione | 24VDC ± 15 VDC opzionale |
| frequenza di risposta | 100 μs |
| temperatura ambiente | -60-70 ℃ |
| carico massimo | 150%fs |
| Resistenza all'isolamento | > 200 MΩ |
| zero deriva | <0,5% |
| precisione | 0,1% 0,25% 0,5% opzionale |
| ripetibilità | <0.1 |
| linearità | <0,1% |
| Isteresi | <0,1% |
| Umidità relativa | <90%di RH |
| Tempo di risposta all'onda di deformazione dinamica | 32x10-6s |
Precauzioni
1. Il cablaggio di questa serie di sensori di coppia deve essere collegato in base al diagramma del cablaggio e la potenza può essere attivata solo dopo la conferma.
2. Verificare che l'alimentazione selezionata debba essere coerente con l'alimentazione di ingresso del sensore.
3. L'uscita della linea del segnale non può essere collegata a terra, che causerà un cortocircuito.
4. Lo strato di schermatura del cavo schermato deve essere collegato all'alimentazione terminale comune di alimentazione +1 5 V.
5. Quando il sensore è fissato, deve essere fisso saldamente con la base dell'attrezzatura. L'altezza centrale deve essere adeguatamente regolata per evitare momenti di piegatura. L'errore di altezza centrale dovrebbe essere inferiore a 0,05 mm.
6. Se hai domande durante l'uso, contatta la nostra azienda in tempo e non è consentito disassemblarlo da solo durante il periodo di garanzia.
7. Non inserire mai o rimuovere la spina quando l'alimentazione è accesa.
8. Segnale di uscita: Frequenza dell'onda quadra ± 15kHz Punto zero: 10 kHz, scala in avanti: 15 kHz, uscita inversa 5 kHz a scala piena 4-20 mA: coppia zero: 12.000 mA; In avanti su larga scala: 20.000 mA; Inversa scala su larga scala: 4.000 Ma
9. Questa serie di sensori di coppia può funzionare a lungo a causa dell'alimentazione a induzione e sono ampiamente utilizzate nel monitoraggio della coppia di motori, centrifughi, generatori, riduttori e motori diesel.
10. Se è necessario misurare la velocità, basta installare un dispositivo di misurazione della velocità speciale sul guscio di questa serie di sensori di coppia. Il sensore e la sua ruota del tachimetro possono misurare il segnale di velocità di 6-60 onde quadrate per rivoluzione.
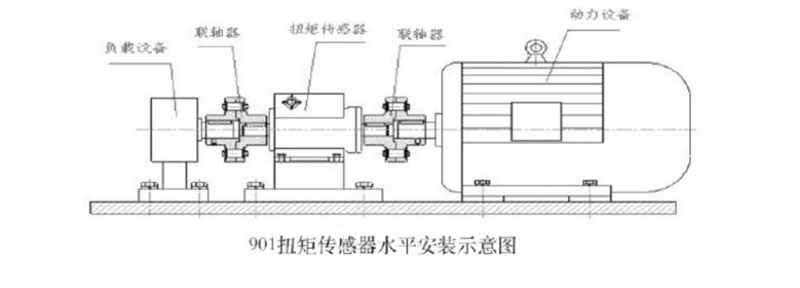
11. Utilizzando due set di accoppiamenti, installare il sensore di coppia della cinghia tra la sorgente di alimentazione e il carico.
12. Le apparecchiature di alimentazione e carico devono essere fisse e affidabili per evitare le vibrazioni.
13. Correggi la base del sensore di coppia e la base dell'attrezzatura nel modo più flessibile possibile (può oscillare) per evitare il momento di flessione.
Cablaggio
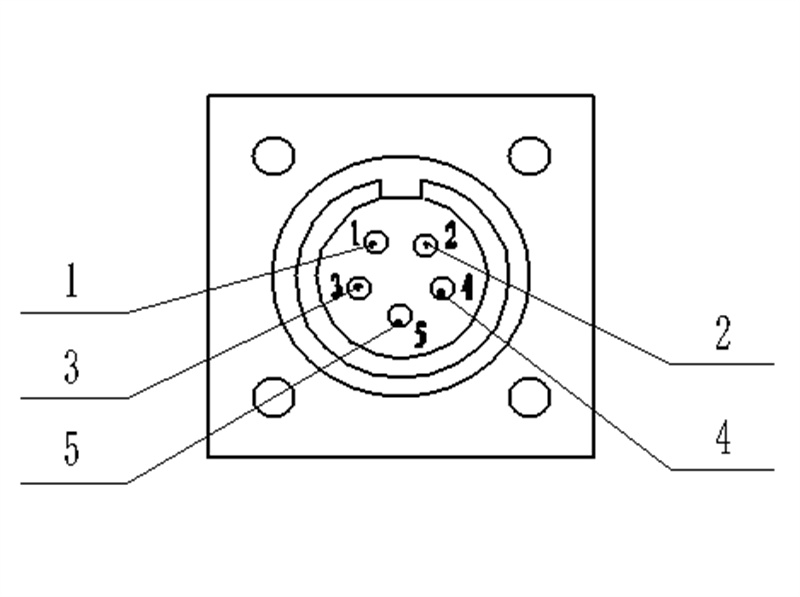
1. Grounding
2. +15V
3. -15V
4. Uscita del segnale di velocità
5. Output del segnale di coppia
ImparentatoProdotti
-

Overload del contenitore di blocco Twist intelligente LKS d ...
-

Mixer di trazione WB Mixer foraggio TMR PROCESSI ...
-

SSB Tipo stazionario Mixer FODDER TMR FEED PROCE ...
-

Modulo di pesatura del serbatoio SLB Sensore di deformazione SLB
-

705B Fence di tensione di microamometro personalizzato ...
-

706 Sensore di microamometro personalizzato




