


901 Mitme spetsifikatsiooni dünaamiline ja staatiline pöördemomendi arvesti pöördemomendi andur





Omadused
1. Maht (NM): ± 5 …… ± 500000
2
3. saab mõõta dünaamilist pöördemomenti ja staatilist pöördemomenti
4. tööpõhimõte: traadita toiteallikas ja traadita väljund
5.
6. Signaal võtab kasutusele digitaaltehnoloogia, tugev sekkumisvastane
7. Sisendvõimsuse polaarsus, väljundmoment, kiirusesignaali kaitse
8. Puuduvad kulumisosi, näiteks kollektsionäär ja see võib pika aja jooksul suurel kiirusel töötada
9. pöördemomendi mõõtmise täpsusel pole pöörlemiskiiruse ja suunaga midagi pistmist
10. Suur täpsus ja hea stabiilsus
11. saab mõõta pöördemomenti, kiirust ja võimsust
12. Väikese suurusega, kerge rass, lihtne paigaldamine
13. Suur usaldusväärsus ja pikk eluiga
14. saab paigaldada mis tahes asendisse ja suunas

Toote kirjeldus
901 pöördemomendi anduri dünaamiline pöördemomendi andur ja staatiline pöördemomendi andur. 5n · m kuni 500000n · m mitme spetsiga dünaamiline ja staatiline pöördemomendi pöördemomendi arvesti.
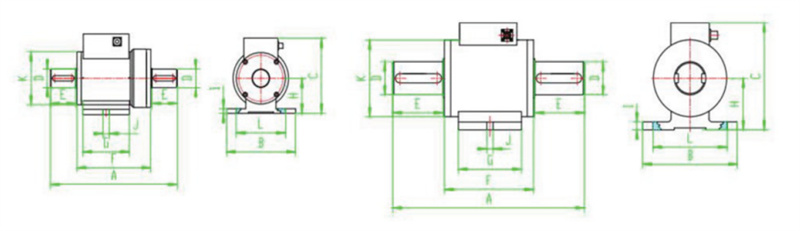
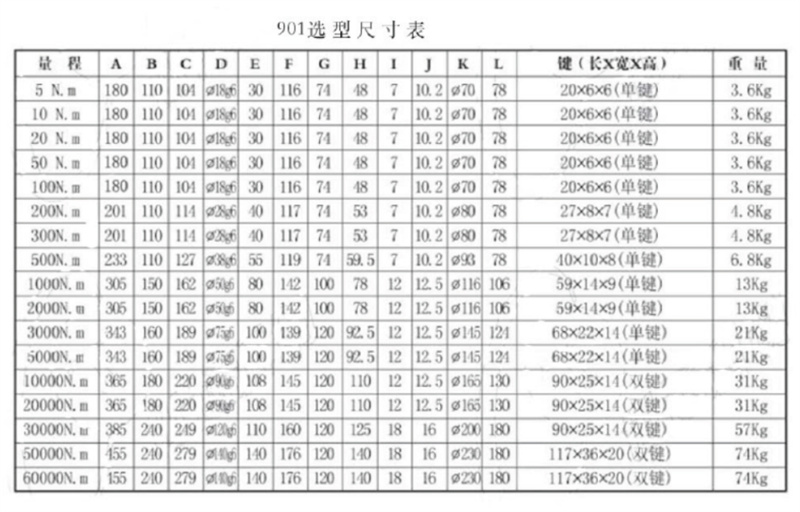
Mõõtmed
Parameetrid
| Mõõtevahemik | 0- ± 5. ± 10. ± 20. ± 50. ± 100. ± 200. ± 500. ± 1000 ± 2000. ± 5000. ± 10000. ± 20000. ± 30000. ± 50000. ± 60000. ± 80000. ± 100000. ± 150000. ± 200000 ± 300000. ± 500000 |
| väljundsignaal | 5-15kHz, 1-5 V, 0-10 V, O- ± 5 V, 4-20 MA |
| amplituud | 10 V |
| võimsus | 4w |
| Töökiirus | 0-30000R/min (mis tahes pöörlemiskiirus valikuline) |
| tarnepinge | 24 VDC ± 15 VDC valikuline |
| reageerimissagedus | 100 μs |
| ümbritsev temperatuur | -60-70 ℃ |
| maksimaalne koormus | 150%FS |
| isolatsioonitakistus | > 200 MΩ |
| null triiv | <0,5% |
| täpsus | 0,1% 0,25% 0,5% valikuline |
| korratatavus | <0,1 |
| lineaarsus | <0,1% |
| Hüsterees | <0,1% |
| Suhteline õhuniiskus | <90%RH |
| Dünaamiline tüve laine reageerimise aeg | 32x10-6s |
Ettevaatusabinõud
1. Selle pöördemomendi andurite seeria juhtmestik tuleb ühendada juhtmestiku skeemile ja võimsust saab sisse lülitada alles pärast kinnitust.
2. Kontrollige, kas valitud toiteallikas peab olema anduri sisendvõimsusega kooskõlas.
3. Signaalijoone väljundit ei saa maapinnaga ühendada, mis põhjustab lühise.
4. varjestatud kaabli varjestuskiht tuleb ühendada +1 5 V toiteallika ühise klemmi toiteallikaga.
5. Kui andur on fikseeritud, tuleb see seadme alusega kindlalt fikseerida. Keskkõrgust tuleb paindehetkede vältimiseks korralikult reguleerida. Keskkõrguse viga peaks olema väiksem kui 0,05 mm.
6. Kui teil on kasutamise ajal küsimusi, võtke meie ettevõttega õigeks ajaks ühendust ja teil ei ole lubatud seda garantiiaja jooksul ise lahti võtta.
7. Ärge kunagi sisestage ega eemaldage pistik, kui toide on sisse lülitatud.
8. Väljundsignaal: ruutlaine sagedus ± 15kHz nullpunkt: 10 kHz, edasisisene skaala: 15 kHz, tagurpidi täisskaala 5kHz väljund 4-20mA: null pöördemoment: 12 000 Ma; Edasi täisskaala: 20 000 mA; Pöörake täisskaala: 4,000 Ma
9. See pöördemomendi andurite seeria võib induktsiooni toiteallika tõttu pikka aega töötada ja neid kasutatakse laialdaselt mootorite, tsentrifuugide, generaatorite, redutsentide ja diiselmootorite pöördemomendi jälgimisel.
10. Kui teil on vaja kiirust mõõta, paigaldage selle pöördemomendi andurite seeria kestale lihtsalt spetsiaalne kiiruse mõõtmisseade. Andur ja selle tahhomeetri ratas saavad mõõta 6-60 ruutlaine kiirusesignaali revolutsiooni kohta.
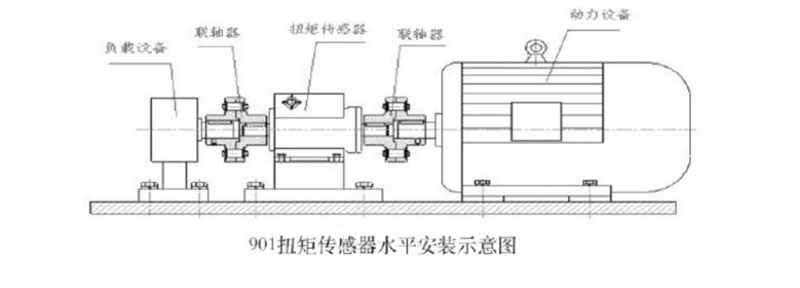
11. Paigaldage toiteallika ja koormuse vahele rihma pöördemomendi andur kahte komplekti.
12. Vibratsiooni vältimiseks peavad toite- ja koormusseadmed olema fikseeritud ja usaldusväärsed.
13. Kinnitage pöördemomendi anduri alus ja seadme alus võimalikult paindlikult (saab kiikuda), et vältida paindemomenti.
Juhtmestik
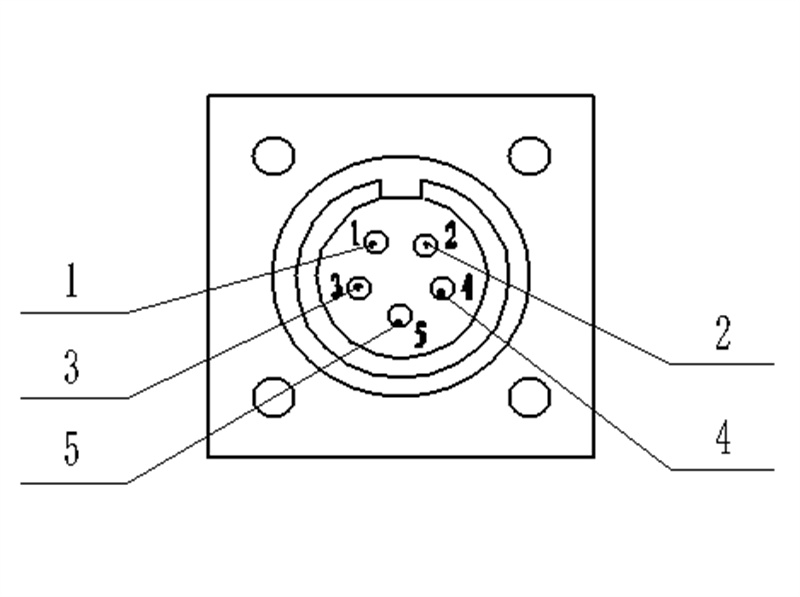
1. maandus
2. +15 V
3. -15V
4. kiirusesignaali väljund
5. pöördemomendi signaali väljund










